Быстрые автомобили. Миллионы из нас любят их. Эта идея преодолевает национальные границы, расу, религию, политику. Мы принимали их более века, начиная с величественных Stutz Bearcat и Mercer Raceabout (известных как «Стейнвей автомобильного мира») в начале 1900-х годов, сексуальных Pontiac GTO и Ford Mustangs 1960-х годов и заканчивая роскошными творениями семейств Lamborghini и Ferrari.
Режиссер фильма «Трансформеры» Майкл Бэй, который знает толк в возмутительных автомобилях, заявил: «Быстрые автомобили — мой единственный порок». Многие с этим согласятся.
Убежденные поклонники гонок также охотно поддержат оценку жизни на быстрой полосе, данную удостоенным награды гонщиком Парнелли Джонсом: «Если вы контролируете ситуацию, вы едете недостаточно быстро».
Теперь роботизированные автомобили присоединяются к веселью.
Исследователи из Калифорнийского университета в Беркли разработали, по их словам, первую систему, которая обучает небольшие роботизированные автомобили автономному высокоскоростному вождению, адаптируясь к реальной обстановке и совершенствуясь в ней.
«Наша система, FastRLAP, обучается автономно в реальном мире без вмешательства человека, не требуя симуляции или демонстрации эксперта», — сказал аспирант-исследователь робототехники Кайл Стахович (Kyle Stachowicz).
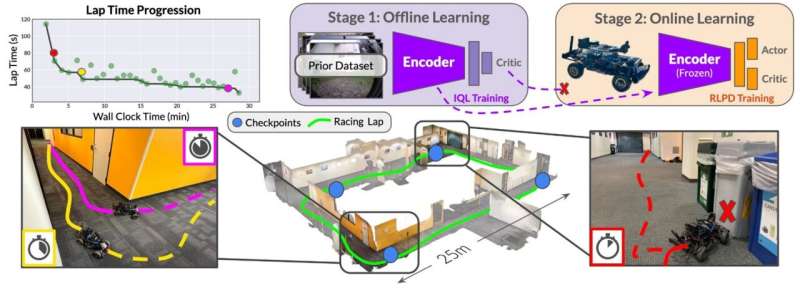
Он описал компоненты, которые он и его команда использовали в своем исследовании, доступном сейчас на сервере препринтов arXiv. Во-первых, это этап инициализации, на котором генерируются данные о различных условиях вождения. Модель автомобиля вручную направляется по различным трассам, где главной целью является предотвращение столкновений, а не скорость. Автомобиль не обязательно должен быть тем же самым, который в конечном итоге научится быстро ездить.
После составления большого набора данных, охватывающего широкий спектр маршрутов, роботизированный автомобиль направляется на трассу, которую ему необходимо изучить. Делается предварительный круг, чтобы можно было определить периметр, а затем машина отправляется в путь. Имея на руках набор данных, автомобиль обучается с помощью алгоритмов RL (reinforcement learning) более эффективному прохождению трассы с течением времени, избегая препятствий и повышая свою эффективность за счет корректировки направления и скорости.
Исследователи сказали, что они были «удивлены», обнаружив, что роботизированные автомобили могут научиться быстро проходить гоночные трассы менее чем за 20 минут обучения.
По словам Стаховича, полученные результаты «демонстрируют появляющиеся навыки агрессивного вождения, такие как своевременное торможение и ускорение на поворотах и избегание зон, препятствующих движению робота». Навыки, продемонстрированные роботизированным автомобилем, «приближаются к показателям водителя-человека, использующего аналогичный интерфейс от первого лица в процессе обучения».
Примером навыка, усвоенного автомобилем, является идея «гоночной линии».
Роботизированный автомобиль находит «плавный путь через круг… максимизируя свою скорость на крутых поворотах», — сказал Стахович. «Робот учится переносить скорость в апекс, затем резко тормозит для поворота и ускоряется на выходе из поворота, чтобы минимизировать продолжительность движения».
В другом примере машина учится слегка превышать скорость при повороте на поверхности с низким коэффициентом трения, «дрейфуя в поворот для достижения быстрого поворота без торможения во время поворота».
Стахович сказал, что в будущем система должна будет решать вопросы безопасности. В настоящее время система предотвращения столкновений вознаграждается только за то, что она предотвращает срыв задания. Она не прибегает к мерам безопасности, таким как осторожность в незнакомой обстановке.
«Мы надеемся, что устранение этих ограничений позволит системам на основе РЛ научиться сложным и высокоэффективным навыкам навигации в широком диапазоне областей, и мы считаем, что наша работа может стать ступенькой на пути к этому», — сказал он.
Как и герой Тома Круза «Мэверик» в фильме «Top Gun», исследователи «чувствуют необходимость, потребность в скорости». Пока что они на правильном пути.